http://www.sea-technology.com/e-news/0812/enews08121.html#item6
OpenROV, an open-source project centered on a robotic submarine intended to give the public access to ocean exploration, raised $111,622 from 484 backers in a Kickstarter fundraising campaign that ended August 1. The final tally was well above the original $20,000 goal. The funds will go toward the manufacturing of OpenROV kits, comprising components for building an ROV. User feedback will be used to improve design and functionality.
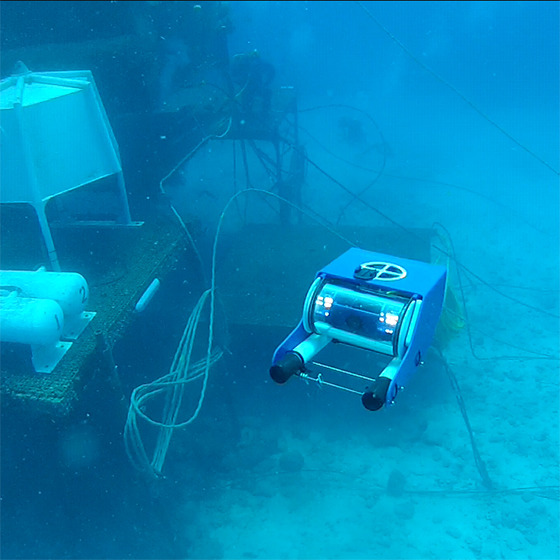
The OpenROV is 30-by-20-by-15 centimeters, moves about 1 meter per second, weighs approximately 2.5 kilograms, runs for 1.5 hours and has been designed to go up to 100 meters depth. Motors can be replaced off the shelf. Movement is controlled by a computer's keyboard, and the interface is hosted as a web server from the ROV. A USB game-controlled interface is being developed, with eventual plans to control the ROV via the Internet.
Eric Stackpole, who is a mechanical engineer at NASA Ames Research Center, and David Lang are the co-founders of OpenROV. Sea Technology spoke with Lang to discuss the project:
What design considerations went into creating the OpenROV?
The goal has always been to create something easy enough to be built by someone in their garage and able to do serious scientific research. We wanted something capable of going down to 100 meters, cost less than $1,000 and be made form off-the-shelf parts.
How have the design/engineering issues and challenges evolved as crowd-sourced input continues to come in?
We got a surge of new contributors in the past month. Most of the input now is on the electronics and software. We've asked people what features they want and how they want to interact with the custom PCB board.
Where have you tested the ROV, and how did it perform?
Most testing has been done at the reservoir near Eric’s house in Cupertino, California, Hall City Cave in northern California and NOAA's Aquarius Reef Base underwater reach laboratory. The ROV performed well—that was the early prototype with an analog control. The kits have digital control, and the ROV processes digital video on board.
OpenROV has been touted as an inexpensive tool for ocean exploration up to 100 meters deep. What are the basics of keeping the robot low-cost?
The ROV hasn’t reached 100 meters yet. It’s gone 80 feet max. It’s low cost because prototype tools are available at a tech shop, and we have access to a laser cutter. The cost of electronics has dropped so far down. An embedded Linux system costs $80, $40—the cost is dropping. The system includes digital video, and the PCB board controls the motors.
Do you envision the ROV going deeper than 100 meters?
Yes. That's a good goal. What we’re most excited about is building an open-source community of professional and amateur builders.
http://www.sea-technology.com/e-news/0812/enews08121.html#item6
Fonte: José Paulo Vilela Soares da Cunha - Professor Adjunto